Skew-symmetric matrix construction and Rodrigues rotation formula. More...
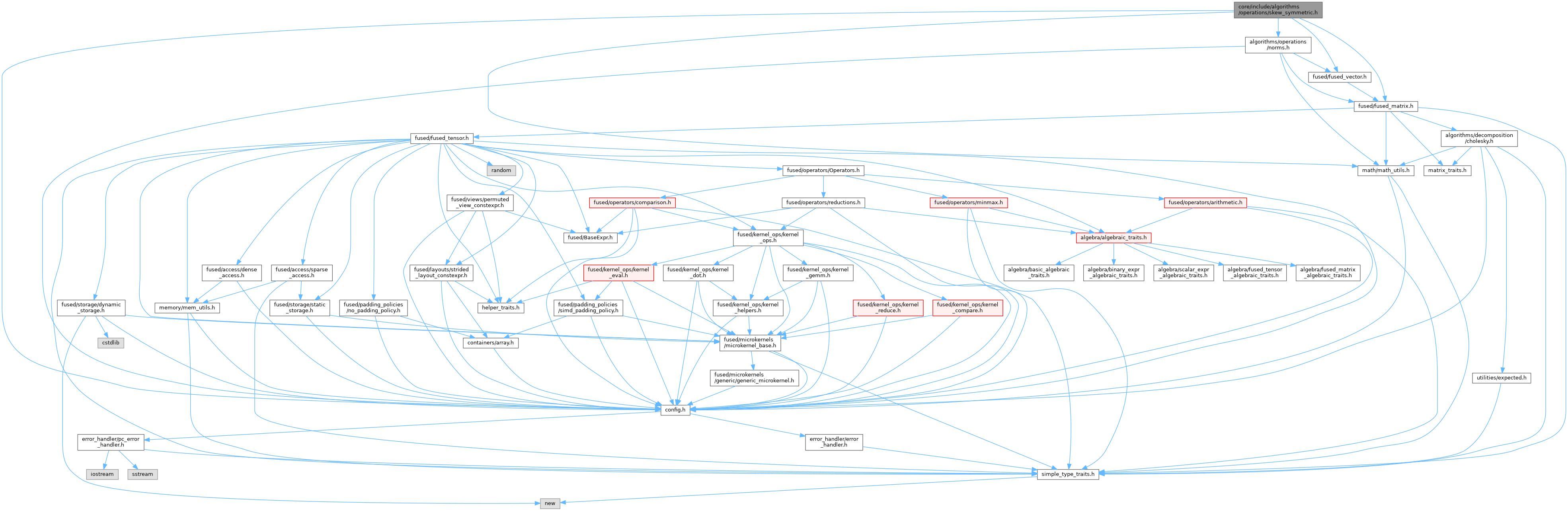
#include "config.h"#include "fused/fused_matrix.h"#include "fused/fused_vector.h"#include "math/math_utils.h"#include "algorithms/operations/norms.h"
Include dependency graph for skew_symmetric.h:
Go to the source code of this file.
Namespaces | |
| namespace | matrix_algorithms |
Functions | |
| template<typename T > | |
| FusedMatrix< T, 3, 3 > | matrix_algorithms::skew_symmetric (const FusedVector< T, 3 > &v) |
| Construct the 3×3 skew-symmetric matrix [v]× from a 3-vector. | |
| template<typename T > | |
| FusedMatrix< T, 3, 3 > | matrix_algorithms::rodrigues (const FusedVector< T, 3 > &omega, T t=T(1)) |
| Compute the rotation matrix R = exp(t · [ω]×) via Rodrigues formula. | |
Detailed Description
Skew-symmetric matrix construction and Rodrigues rotation formula.
Provides:
- skew_symmetric(v): 3-vector → 3×3 skew-symmetric matrix [v]×
- rodrigues(omega, t): matrix exponential exp(t·[ω]×) for SO(3) rotations
SKEW-SYMMETRIC (5a)
Given ω = [ω₁, ω₂, ω₃], the skew-symmetric matrix is:
[ω]× = [ 0 -ω₃ ω₂ ] [ ω₃ 0 -ω₁ ] [ -ω₂ ω₁ 0 ]
Key property: [ω]× · v = ω × v (cross product).
RODRIGUES FORMULA (5b)
Given an angular velocity vector ω and time step t, the rotation matrix is:
R = exp(t · [ω]×) = I + sin(θ)/θ · [ω]× + (1 − cos(θ))/θ² · [ω]ײ
where θ = t · ‖ω‖ is the rotation angle.
Special cases:
- θ ≈ 0: R ≈ I + t · [ω]× (first-order Taylor, avoids 0/0)
- ‖ω‖ = 0: R = I (no rotation)
Properties of the result:
- R is orthogonal: RᵀR = I
- det(R) = +1 (proper rotation, SO(3))
- R propagates attitude: q(t+dt) = R · q(t)
Complexity: O(1) — fixed 3×3 operations, no loops.