Classes | |
| struct | EigenResult |
| Result of eigenvalue decomposition. More... | |
| struct | GivensQRResult |
| Result of Givens QR decomposition. More... | |
| struct | LUResult |
| Result of LU decomposition with partial pivoting. More... | |
| struct | QRResult |
| Result of Householder QR decomposition. More... | |
Functions | |
| template<typename MatrixType > | |
| Expected< MatrixType, MatrixStatus > | cholesky (const MatrixType &A, typename MatrixType::value_type tol=typename MatrixType::value_type(PRECISION_TOLERANCE)) |
| Compute the Cholesky decomposition of a symmetric positive-definite matrix. | |
| template<typename MatrixType > | |
| MatrixType | cholesky_or_die (const MatrixType &A) |
| Cholesky decomposition — abort on failure. | |
| template<typename T , my_size_t N> | |
| FusedMatrix< T, N, N > | cholesky_rank1_update (const FusedMatrix< T, N, N > &L, const FusedVector< T, N > &v) |
| Rank-1 Cholesky update: compute L' where L'L'ᵀ = LLᵀ + vvᵀ. | |
| template<typename T , my_size_t N> | |
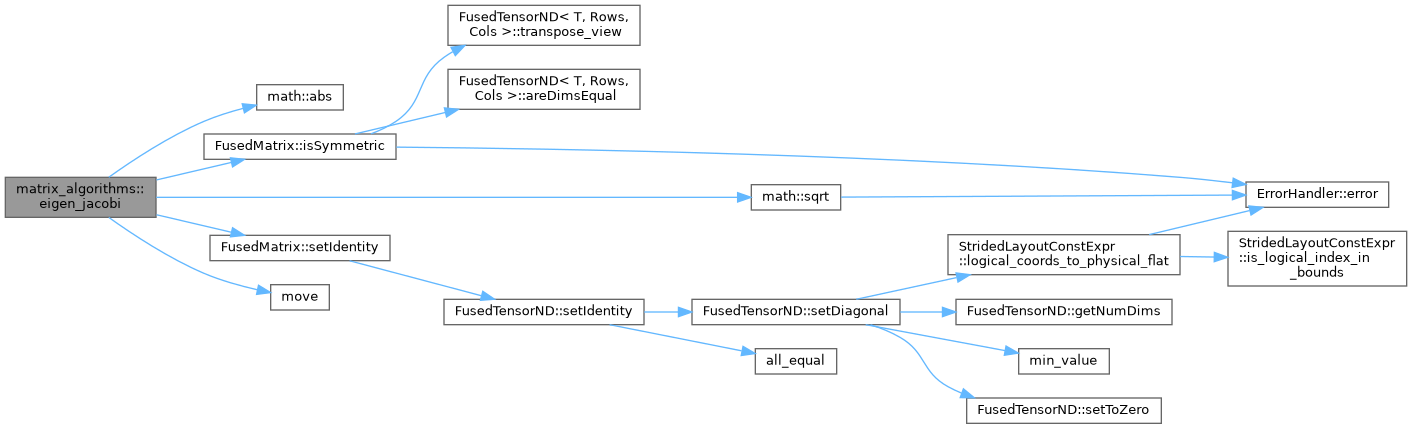
| Expected< EigenResult< T, N >, MatrixStatus > | eigen_jacobi (const FusedMatrix< T, N, N > &A, my_size_t max_iters=100, T tol=T(PRECISION_TOLERANCE)) |
| Compute eigenvalues and eigenvectors of a symmetric matrix via Jacobi. | |
| template<typename T , my_size_t N> | |
| Expected< LUResult< T, N >, MatrixStatus > | lu (const FusedMatrix< T, N, N > &A, T tol=T(PRECISION_TOLERANCE)) |
| Compute the LU decomposition of a square matrix with partial pivoting. | |
| template<typename T , my_size_t N> | |
| LUResult< T, N > | lu_or_die (const FusedMatrix< T, N, N > &A) |
| LU decomposition — abort on failure. | |
| template<typename T , my_size_t M, my_size_t N> | |
| QRResult< T, M, N > | qr_householder (const FusedMatrix< T, M, N > &A) |
| Compute the Householder QR decomposition of a rectangular matrix. | |
| template<typename T , my_size_t M, my_size_t N> | |
| GivensQRResult< T, M, N > | qr_givens (const FusedMatrix< T, M, N > &A) |
| Compute the QR decomposition using Givens rotations. | |
| template<typename T , my_size_t N, my_size_t M> | |
| Expected< FusedMatrix< T, N, M >, MatrixStatus > | kalman_gain (const FusedMatrix< T, N, N > &P, const FusedMatrix< T, M, N > &H, const FusedMatrix< T, M, M > &R) |
| Compute the Kalman gain K = P·Hᵀ·(H·P·Hᵀ + R)⁻¹. | |
| template<typename T , my_size_t N, my_size_t M> | |
| FusedMatrix< T, N, N > | joseph_update (const FusedMatrix< T, N, M > &K, const FusedMatrix< T, M, N > &H, const FusedMatrix< T, N, N > &P, const FusedMatrix< T, M, M > &R) |
| Joseph form covariance update: P' = (I-K·H)·P·(I-K·H)ᵀ + K·R·Kᵀ. | |
| template<typename T , my_size_t N> | |
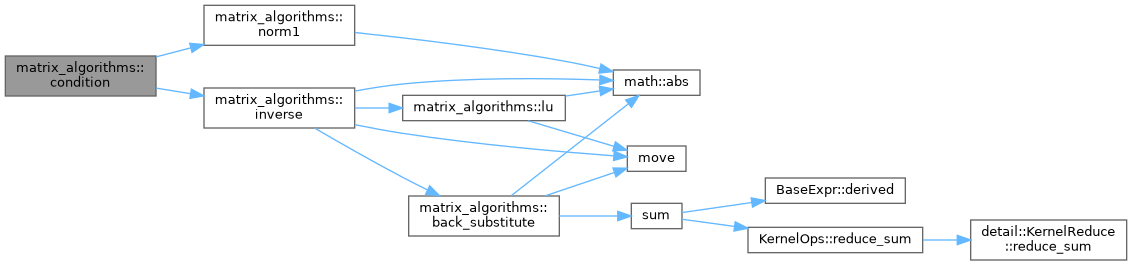
| Expected< T, MatrixStatus > | condition (const FusedMatrix< T, N, N > &A) |
| Compute the condition number of A in the 1-norm: cond₁(A) = ‖A‖₁ · ‖A⁻¹‖₁. | |
| template<typename T , my_size_t N> | |
| FusedVector< T, N > | cross (const FusedVector< T, N > &a, const FusedVector< T, N > &b) |
| Compute the cross product of two 3-vectors. | |
| template<typename T , my_size_t N> | |
| T | determinant (const FusedMatrix< T, N, N > &A) |
| Compute the determinant of a square matrix. | |
| template<typename T > | |
| FusedMatrix< T, 4, 4 > | homogeneous_inverse (const FusedMatrix< T, 4, 4 > &H) |
| Compute the inverse of a 4×4 homogeneous transformation matrix. | |
| template<typename T , my_size_t N> | |
| Expected< FusedMatrix< T, N, N >, MatrixStatus > | inverse (const FusedMatrix< T, N, N > &A) |
| Compute the inverse of a square matrix. | |
| template<typename T , my_size_t N> | |
| FusedMatrix< T, N, N > | inverse_or_die (const FusedMatrix< T, N, N > &A) |
| Matrix inverse — abort on failure. | |
| template<typename T , my_size_t N> | |
| T | norm1 (const FusedMatrix< T, N, N > &A) |
| Compute the 1-norm of a square matrix: max absolute column sum. | |
| template<typename T , my_size_t N> | |
| T | norm2 (const FusedVector< T, N > &v) |
| Compute the Euclidean (2-norm) of a vector: √(Σ vᵢ²). | |
| template<typename T , my_size_t N> | |
| FusedMatrix< T, N, N > | symmetric_rank_k_update (const FusedMatrix< T, N, N > &F, const FusedMatrix< T, N, N > &P, const FusedMatrix< T, N, N > &Q) |
| Compute the symmetric rank-k update P' = F·P·Fᵀ + Q. | |
| template<typename T , my_size_t N> | |
| FusedMatrix< T, N, N > | symmetric_rank_k_update (const FusedMatrix< T, N, N > &F, const FusedMatrix< T, N, N > &P) |
| Compute the symmetric rank-k update P' = F·P·Fᵀ (no noise term). | |
| template<typename T > | |
| FusedMatrix< T, 3, 3 > | skew_symmetric (const FusedVector< T, 3 > &v) |
| Construct the 3×3 skew-symmetric matrix [v]× from a 3-vector. | |
| template<typename T > | |
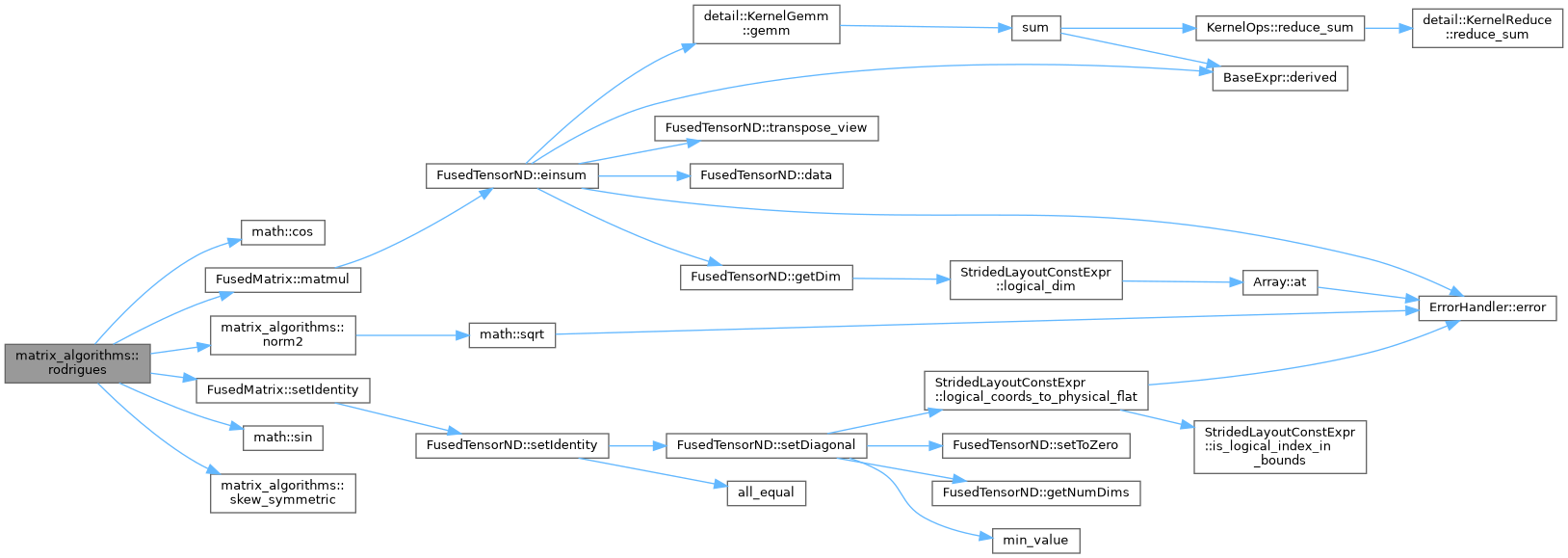
| FusedMatrix< T, 3, 3 > | rodrigues (const FusedVector< T, 3 > &omega, T t=T(1)) |
| Compute the rotation matrix R = exp(t · [ω]×) via Rodrigues formula. | |
| template<typename T , my_size_t N> | |
| T | trace (const FusedMatrix< T, N, N > &A) |
| Compute the trace of a square matrix. | |
| template<typename T , my_size_t N> | |
| Expected< FusedVector< T, N >, MatrixStatus > | cholesky_solve (const FusedMatrix< T, N, N > &A, const FusedVector< T, N > &b) |
| Solve Ax = b for symmetric positive-definite A via Cholesky decomposition. | |
| template<typename T , my_size_t M, my_size_t N> | |
| Expected< FusedVector< T, N >, MatrixStatus > | least_squares (const FusedMatrix< T, M, N > &A, const FusedVector< T, M > &b) |
| Solve the least squares problem min ‖Ax - b‖² via QR. | |
| template<typename T , my_size_t N> | |
| Expected< FusedVector< T, N >, MatrixStatus > | lu_solve (const FusedMatrix< T, N, N > &A, const FusedVector< T, N > &b) |
| Solve Ax = b via LU decomposition with partial pivoting. | |
| template<typename T , my_size_t N> | |
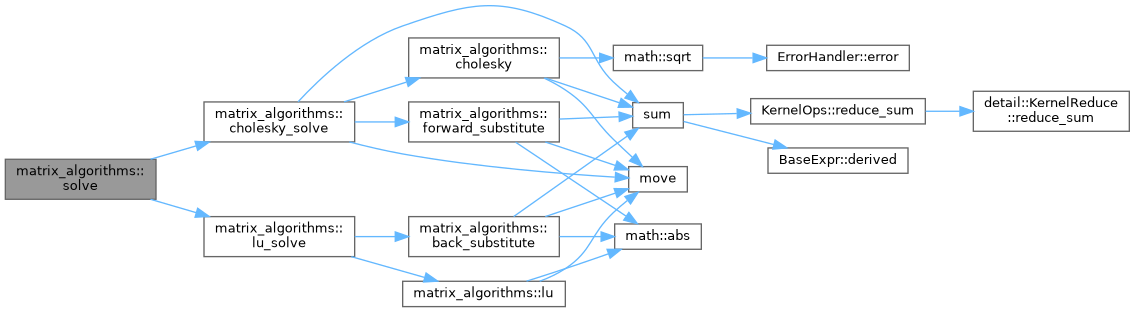
| Expected< FusedVector< T, N >, MatrixStatus > | solve (const FusedMatrix< T, N, N > &A, const FusedVector< T, N > &b) |
| Solve Ax = b with automatic algorithm selection. | |
| template<typename T , my_size_t N> | |
| Expected< FusedVector< T, N >, MatrixStatus > | levinson_durbin (const FusedVector< T, N > &r, const FusedVector< T, N > &b) |
| Solve a symmetric Toeplitz system Tx = b using Levinson-Durbin. | |
| template<bool UnitDiag = false, typename T , my_size_t N> | |
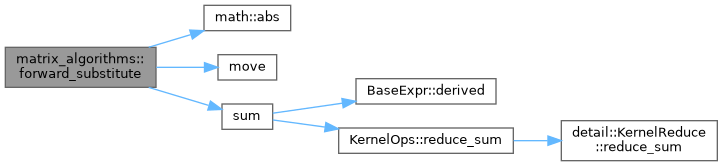
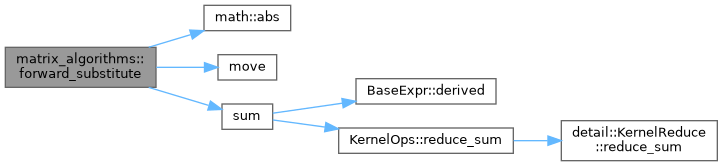
| Expected< FusedVector< T, N >, MatrixStatus > | forward_substitute (const FusedMatrix< T, N, N > &L, const FusedVector< T, N > &b) |
| Solve the lower-triangular system Lx = b by forward substitution. | |
| template<bool UnitDiag = false, typename T , my_size_t N> | |
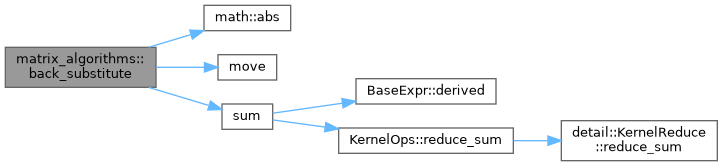
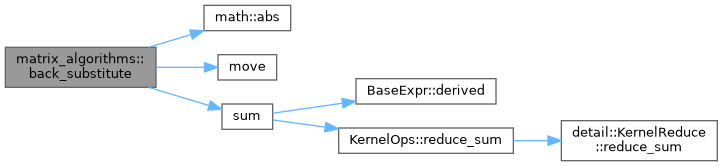
| Expected< FusedVector< T, N >, MatrixStatus > | back_substitute (const FusedMatrix< T, N, N > &U, const FusedVector< T, N > &b) |
| Solve the upper-triangular system Ux = b by back substitution. | |
| template<bool UnitDiag = false, typename T , my_size_t N, my_size_t Ncols> | |
| Expected< FusedMatrix< T, N, Ncols >, MatrixStatus > | forward_substitute (const FusedMatrix< T, N, N > &L, const FusedMatrix< T, N, Ncols > &B) |
| Solve the lower-triangular system LX = B for multiple right-hand sides. | |
| template<bool UnitDiag = false, typename T , my_size_t N, my_size_t Ncols> | |
| Expected< FusedMatrix< T, N, Ncols >, MatrixStatus > | back_substitute (const FusedMatrix< T, N, N > &U, const FusedMatrix< T, N, Ncols > &B) |
| Solve the upper-triangular system UX = B for multiple right-hand sides. | |
| template<typename T , my_size_t N> | |
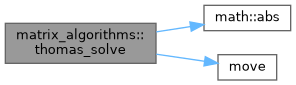
| Expected< FusedVector< T, N >, MatrixStatus > | thomas_solve (const FusedVector< T, N > &a, const FusedVector< T, N > &d, const FusedVector< T, N > &c, const FusedVector< T, N > &b) |
| Solve a tridiagonal system Ax = b using the Thomas algorithm. | |
Function Documentation
◆ back_substitute() [1/2]
| Expected< FusedMatrix< T, N, Ncols >, MatrixStatus > matrix_algorithms::back_substitute | ( | const FusedMatrix< T, N, N > & | U, |
| const FusedMatrix< T, N, Ncols > & | B | ||
| ) |
Solve the upper-triangular system UX = B for multiple right-hand sides.
Each column of B is solved independently via back substitution. Uses the generic scalar path (no fixed-size unrolling).
- Template Parameters
-
UnitDiag If true, the diagonal of U is treated as all ones. T Scalar type (deduced). N System dimension (deduced). Ncols Number of right-hand side columns (deduced).
- Parameters
-
U Upper-triangular NxN matrix. B Right-hand side matrix of size N × Ncols.
- Returns
- Expected containing solution matrix X, or MatrixStatus::Singular on zero diagonal.
◆ back_substitute() [2/2]
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::back_substitute | ( | const FusedMatrix< T, N, N > & | U, |
| const FusedVector< T, N > & | b | ||
| ) |
Solve the upper-triangular system Ux = b by back substitution.
Compile-time dispatch selects a fully unrolled path for N ∈ {3, 4, 6}; all other sizes use a generic scalar loop.
- Template Parameters
-
UnitDiag If true, the diagonal of U is treated as all ones. If false, the actual diagonal entries are used. T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
U Upper-triangular NxN matrix. b Right-hand side vector of length N.
- Returns
- Expected containing solution x, or MatrixStatus::Singular on zero diagonal.
◆ cholesky()
| Expected< MatrixType, MatrixStatus > matrix_algorithms::cholesky | ( | const MatrixType & | A, |
| typename MatrixType::value_type | tol = typename MatrixType::value_type(PRECISION_TOLERANCE) |
||
| ) |
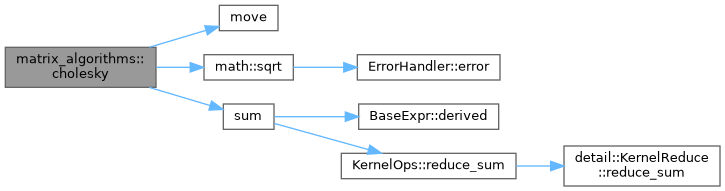
Compute the Cholesky decomposition of a symmetric positive-definite matrix.
Decomposes A into a lower-triangular matrix L such that A = L · Lᵀ.
- Template Parameters
-
MatrixType A square FusedMatrix type exposing: isSymmetric()— runtime symmetry checkgetDim(i)— dimension size along axis ioperator()(i, j)— element accessvalue_type— scalar type (float, double)
- Parameters
-
A Symmetric positive-definite input matrix. tol Diagonal tolerance. Elements ≤ tol are rejected as non-positive-definite. Defaults to PRECISION_TOLERANCE.
- Returns
- Expected containing the lower-triangular factor L on success, or MatrixStatus::NotSymmetric / MatrixStatus::NotPositiveDefinite on failure.
- Example:
- // ... fill A as SPD ...auto result = matrix_algorithms::cholesky(A);if (!result.has_value()) {// handle result.error()return;}auto& L = result.value();// L * L^T ≈ ADefinition fused_matrix.h:12Expected< MatrixType, MatrixStatus > cholesky(const MatrixType &A, typename MatrixType::value_type tol=typename MatrixType::value_type(PRECISION_TOLERANCE))Compute the Cholesky decomposition of a symmetric positive-definite matrix.Definition cholesky.h:87
◆ cholesky_or_die()
| MatrixType matrix_algorithms::cholesky_or_die | ( | const MatrixType & | A | ) |
Cholesky decomposition — abort on failure.
Convenience wrapper for contexts where failure is unrecoverable (offline computation, test code). Calls MyErrorHandler::error() if the decomposition fails.
- Template Parameters
-
MatrixType Same requirements as cholesky().
- Parameters
-
A Symmetric positive-definite input matrix.
- Returns
- The lower-triangular factor L.

◆ cholesky_rank1_update()
| FusedMatrix< T, N, N > matrix_algorithms::cholesky_rank1_update | ( | const FusedMatrix< T, N, N > & | L, |
| const FusedVector< T, N > & | v | ||
| ) |
Rank-1 Cholesky update: compute L' where L'L'ᵀ = LLᵀ + vvᵀ.
Given a lower-triangular Cholesky factor L and a vector v, computes the updated factor L' in O(N²) via Givens rotations. The input L, v is not modified.
- Template Parameters
-
T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
L Lower-triangular Cholesky factor (N×N). v Update vector (N).
- Returns
- Updated Cholesky factor L' such that L'L'ᵀ = LLᵀ + vvᵀ.

◆ cholesky_solve()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::cholesky_solve | ( | const FusedMatrix< T, N, N > & | A, |
| const FusedVector< T, N > & | b | ||
| ) |
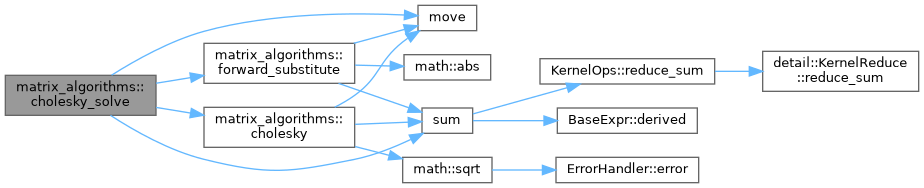
Solve Ax = b for symmetric positive-definite A via Cholesky decomposition.
Decomposes A = LLᵀ, then solves Ly = b (forward substitution) followed by Lᵀx = y (back substitution using L transposed).
The internal back substitution step accesses L(k,i) directly (i.e. Lᵀ(i,k)) to avoid creating a separate transpose. Singular checks are skipped for this step since cholesky() already guarantees a valid L with positive diagonal.
- Template Parameters
-
T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
A Symmetric positive-definite matrix (N×N). b Right-hand side vector (N).
- Returns
- Expected containing solution x on success, or MatrixStatus error forwarded from cholesky/substitution on failure.
- Example:
- // ... fill A (SPD) and b ...auto result = matrix_algorithms::cholesky_solve(A, b);if (!result.has_value()) {// handle result.error()return;}auto& x = result.value();// A * x ≈ bDefinition fused_vector.h:9Expected< FusedVector< T, N >, MatrixStatus > cholesky_solve(const FusedMatrix< T, N, N > &A, const FusedVector< T, N > &b)Solve Ax = b for symmetric positive-definite A via Cholesky decomposition.Definition cholesky_solve.h:81
◆ condition()
| Expected< T, MatrixStatus > matrix_algorithms::condition | ( | const FusedMatrix< T, N, N > & | A | ) |
Compute the condition number of A in the 1-norm: cond₁(A) = ‖A‖₁ · ‖A⁻¹‖₁.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N).
- Returns
- Expected containing the condition number on success, or MatrixStatus::Singular if A is not invertible.
◆ cross()
| FusedVector< T, N > matrix_algorithms::cross | ( | const FusedVector< T, N > & | a, |
| const FusedVector< T, N > & | b | ||
| ) |
Compute the cross product of two 3-vectors.
- Template Parameters
-
T Scalar type (deduced). Works on float, double, and integers. N Vector dimension (deduced). Must be 3.
- Parameters
-
a First input vector (3×1). b Second input vector (3×1).
- Returns
- a × b as a 3-vector.
◆ determinant()
| T matrix_algorithms::determinant | ( | const FusedMatrix< T, N, N > & | A | ) |
Compute the determinant of a square matrix.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N).
- Returns
- Determinant of A. Zero if A is singular (generic path).

◆ eigen_jacobi()
| Expected< EigenResult< T, N >, MatrixStatus > matrix_algorithms::eigen_jacobi | ( | const FusedMatrix< T, N, N > & | A, |
| my_size_t | max_iters = 100, |
||
| T | tol = T(PRECISION_TOLERANCE) |
||
| ) |
Compute eigenvalues and eigenvectors of a symmetric matrix via Jacobi.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Symmetric input matrix (N×N). max_iters Maximum number of sweeps (default 100). tol Convergence tolerance for off-diagonal norm (default PRECISION_TOLERANCE).
- Returns
- Expected containing EigenResult on success, or MatrixStatus error on failure.
- Example:
- // ... fill A (symmetric) ...auto result = matrix_algorithms::eigen_jacobi(A);if (result.has_value()) {auto& eig = result.value();// eig.eigenvalues(i) — the i-th eigenvalue// eig.eigenvectors column i — the i-th eigenvector// V * diag(λ) * Vᵀ ≈ A}Expected< EigenResult< T, N >, MatrixStatus > eigen_jacobi(const FusedMatrix< T, N, N > &A, my_size_t max_iters=100, T tol=T(PRECISION_TOLERANCE))Compute eigenvalues and eigenvectors of a symmetric matrix via Jacobi.Definition eigen.h:101
◆ forward_substitute() [1/2]
| Expected< FusedMatrix< T, N, Ncols >, MatrixStatus > matrix_algorithms::forward_substitute | ( | const FusedMatrix< T, N, N > & | L, |
| const FusedMatrix< T, N, Ncols > & | B | ||
| ) |
Solve the lower-triangular system LX = B for multiple right-hand sides.
Each column of B is solved independently via forward substitution. Uses the generic scalar path (no fixed-size unrolling).
- Template Parameters
-
UnitDiag If true, the diagonal of L is treated as all ones. T Scalar type (deduced). N System dimension (deduced). Ncols Number of right-hand side columns (deduced).
- Parameters
-
L Lower-triangular NxN matrix. B Right-hand side matrix of size N × Ncols.
- Returns
- Expected containing solution matrix X, or MatrixStatus::Singular on zero diagonal.
◆ forward_substitute() [2/2]
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::forward_substitute | ( | const FusedMatrix< T, N, N > & | L, |
| const FusedVector< T, N > & | b | ||
| ) |
Solve the lower-triangular system Lx = b by forward substitution.
Compile-time dispatch selects a fully unrolled path for N ∈ {3, 4, 6}; all other sizes use a generic scalar loop.
- Template Parameters
-
UnitDiag If true, the diagonal of L is treated as all ones (implicit unit diagonal, as produced by LU with partial pivoting). If false, the actual diagonal entries are used. T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
L Lower-triangular NxN matrix. b Right-hand side vector of length N.
- Returns
- Expected containing solution x, or MatrixStatus::Singular on zero diagonal.
◆ homogeneous_inverse()
| FusedMatrix< T, 4, 4 > matrix_algorithms::homogeneous_inverse | ( | const FusedMatrix< T, 4, 4 > & | H | ) |
Compute the inverse of a 4×4 homogeneous transformation matrix.
- Template Parameters
-
T Scalar type (deduced). Must be floating-point.
- Parameters
-
H 4×4 homogeneous transform [R|t; 0 0 0 1].
- Returns
- H⁻¹ = [Rᵀ | -Rᵀt; 0 0 0 1].
◆ inverse()
| Expected< FusedMatrix< T, N, N >, MatrixStatus > matrix_algorithms::inverse | ( | const FusedMatrix< T, N, N > & | A | ) |
Compute the inverse of a square matrix.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N).
- Returns
- Expected containing A⁻¹ on success, or MatrixStatus::Singular if A is not invertible.
- Example:
- // ... fill A ...auto result = matrix_algorithms::inverse(A);if (!result.has_value()) {// handle singular matrixreturn;}auto& Ainv = result.value();// A * Ainv ≈ IExpected< FusedMatrix< T, N, N >, MatrixStatus > inverse(const FusedMatrix< T, N, N > &A)Compute the inverse of a square matrix.Definition inverse.h:65
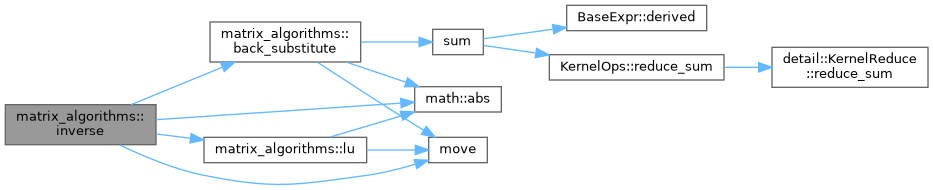
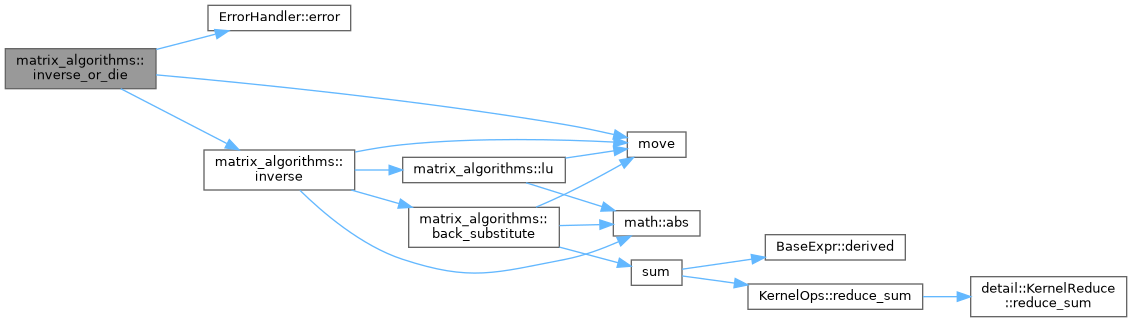
◆ inverse_or_die()
| FusedMatrix< T, N, N > matrix_algorithms::inverse_or_die | ( | const FusedMatrix< T, N, N > & | A | ) |
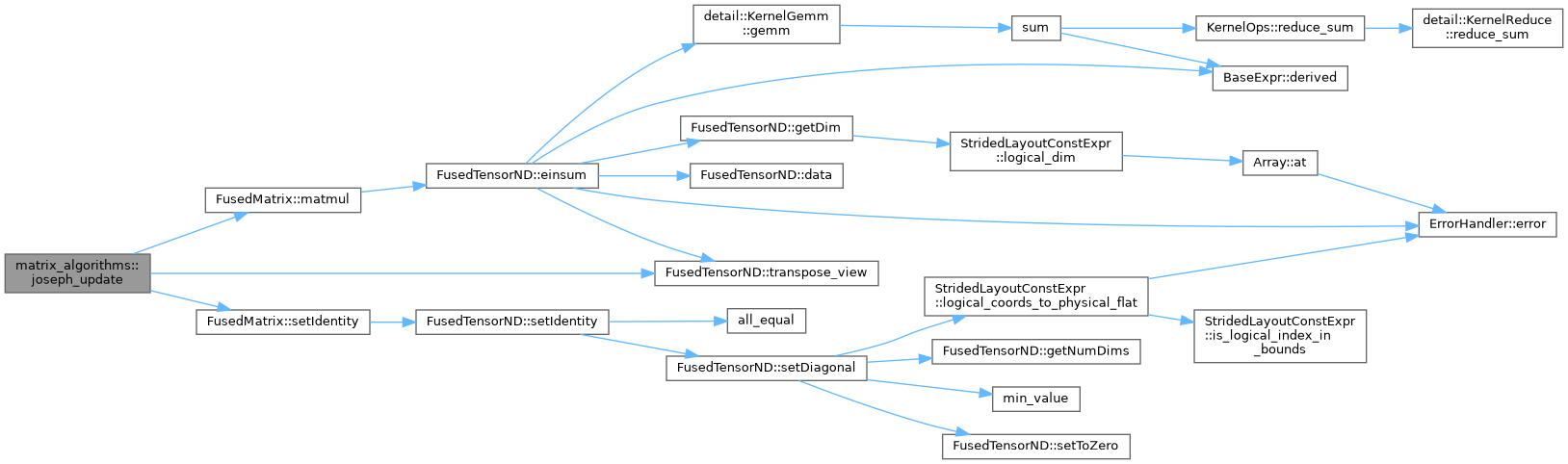
◆ joseph_update()
| FusedMatrix< T, N, N > matrix_algorithms::joseph_update | ( | const FusedMatrix< T, N, M > & | K, |
| const FusedMatrix< T, M, N > & | H, | ||
| const FusedMatrix< T, N, N > & | P, | ||
| const FusedMatrix< T, M, M > & | R | ||
| ) |
Joseph form covariance update: P' = (I-K·H)·P·(I-K·H)ᵀ + K·R·Kᵀ.
Numerically stable covariance update that guarantees symmetry and positive semi-definiteness of the result.
- Template Parameters
-
T Scalar type (deduced). N State dimension (deduced). M Measurement dimension (deduced).
- Parameters
-
K Kalman gain (N×M). H Observation matrix (M×N). P Prior state covariance (N×N). R Measurement noise covariance (M×M).
- Returns
- Updated covariance P' (N×N).
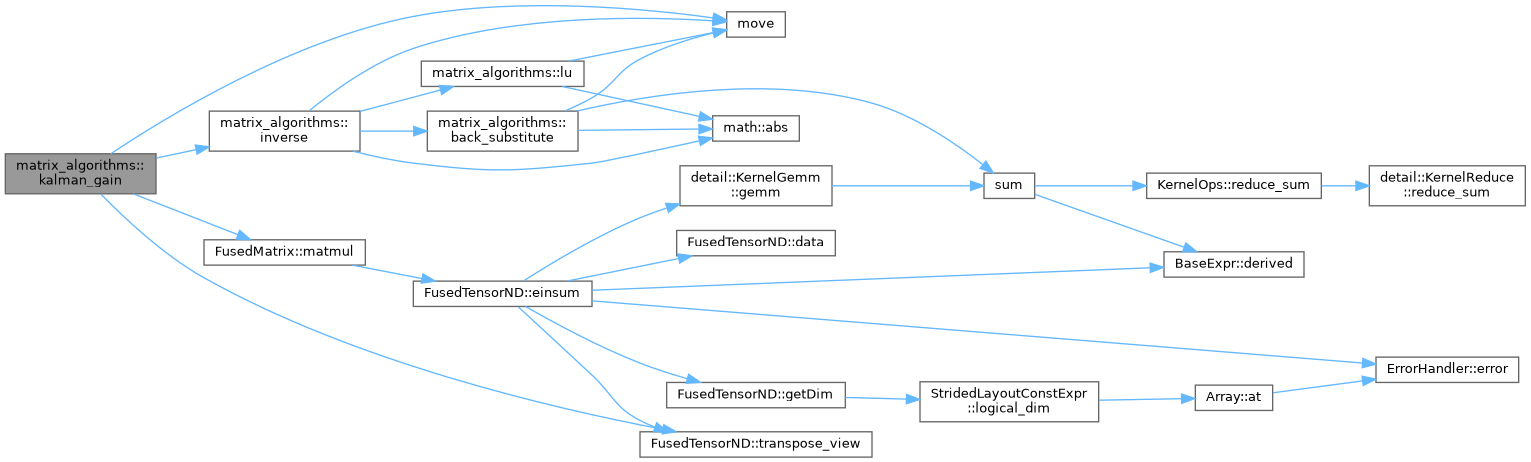
◆ kalman_gain()
| Expected< FusedMatrix< T, N, M >, MatrixStatus > matrix_algorithms::kalman_gain | ( | const FusedMatrix< T, N, N > & | P, |
| const FusedMatrix< T, M, N > & | H, | ||
| const FusedMatrix< T, M, M > & | R | ||
| ) |
Compute the Kalman gain K = P·Hᵀ·(H·P·Hᵀ + R)⁻¹.
- Template Parameters
-
T Scalar type (deduced). N State dimension (deduced). M Measurement dimension (deduced).
- Parameters
-
P State covariance (N×N), symmetric positive definite. H Observation matrix (M×N). R Measurement noise covariance (M×M), symmetric positive definite.
- Returns
- Expected containing the Kalman gain K (N×M) on success, or MatrixStatus::Singular if the innovation covariance is not invertible.
◆ least_squares()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::least_squares | ( | const FusedMatrix< T, M, N > & | A, |
| const FusedVector< T, M > & | b | ||
| ) |
Solve the least squares problem min ‖Ax - b‖² via QR.
- Template Parameters
-
T Scalar type (deduced). M Number of rows in A (deduced, M ≥ N). N Number of columns in A (deduced).
- Parameters
-
A Input matrix (M×N). b Right-hand side vector (M).
- Returns
- Expected containing the least squares solution x (N) on success, or MatrixStatus::Singular if A is rank-deficient.
- Example:
- // Fit y = a + b*x to 4 data pointsFusedMatrix<double, 4, 2> A; // [1 x0; 1 x1; 1 x2; 1 x3]FusedVector<double, 4> b; // [y0; y1; y2; y3]auto result = matrix_algorithms::least_squares(A, b);if (result.has_value()) {auto& x = result.value(); // x(0)=intercept, x(1)=slope}Expected< FusedVector< T, N >, MatrixStatus > least_squares(const FusedMatrix< T, M, N > &A, const FusedVector< T, M > &b)Solve the least squares problem min ‖Ax - b‖² via QR.Definition least_squares.h:70

◆ levinson_durbin()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::levinson_durbin | ( | const FusedVector< T, N > & | r, |
| const FusedVector< T, N > & | b | ||
| ) |
Solve a symmetric Toeplitz system Tx = b using Levinson-Durbin.
- Template Parameters
-
T Scalar type (deduced). N System size (deduced).
- Parameters
-
r First row of the Toeplitz matrix (N elements). r(0) is the diagonal. b Right-hand side vector (N).
- Returns
- Expected containing solution x on success, or MatrixStatus error on failure.
- Example:
- // Solve [4 2 1; 2 4 2; 1 2 4] x = bFusedVector<double, 3> r, b;r(0) = 4; r(1) = 2; r(2) = 1; // first row defines entire matrix// ... fill b ...auto result = matrix_algorithms::levinson_durbin(r, b);Expected< FusedVector< T, N >, MatrixStatus > levinson_durbin(const FusedVector< T, N > &r, const FusedVector< T, N > &b)Solve a symmetric Toeplitz system Tx = b using Levinson-Durbin.Definition toeplitz.h:91
◆ lu()
| Expected< LUResult< T, N >, MatrixStatus > matrix_algorithms::lu | ( | const FusedMatrix< T, N, N > & | A, |
| T | tol = T(PRECISION_TOLERANCE) |
||
| ) |
Compute the LU decomposition of a square matrix with partial pivoting.
Decomposes A into P·A = L·U where L has unit diagonal.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N). tol Pivot tolerance. Pivots with |value| ≤ tol are rejected as singular. Defaults to PRECISION_TOLERANCE.
- Example:
- // ... fill A ...auto result = matrix_algorithms::lu(A);if (!result.has_value()) {// handle result.error()return;}auto& lu = result.value();// lu.LU contains compact factorization// lu.perm contains row permutation// lu.sign contains permutation signExpected< LUResult< T, N >, MatrixStatus > lu(const FusedMatrix< T, N, N > &A, T tol=T(PRECISION_TOLERANCE))Compute the LU decomposition of a square matrix with partial pivoting.Definition lu.h:151
◆ lu_or_die()
| LUResult< T, N > matrix_algorithms::lu_or_die | ( | const FusedMatrix< T, N, N > & | A | ) |
◆ lu_solve()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::lu_solve | ( | const FusedMatrix< T, N, N > & | A, |
| const FusedVector< T, N > & | b | ||
| ) |
Solve Ax = b via LU decomposition with partial pivoting.
Works for any non-singular square matrix.
- Template Parameters
-
T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
A Square input matrix (N×N). b Right-hand side vector (N).
- Returns
- Expected containing solution x on success, or MatrixStatus error on failure.

◆ norm1()
| T matrix_algorithms::norm1 | ( | const FusedMatrix< T, N, N > & | A | ) |
Compute the 1-norm of a square matrix: max absolute column sum.
Works for any numeric type (not restricted to floating point).
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N).
- Returns
- ‖A‖₁ = max_j Σ_i |A(i,j)|.

◆ norm2()
| T matrix_algorithms::norm2 | ( | const FusedVector< T, N > & | v | ) |
Compute the Euclidean (2-norm) of a vector: √(Σ vᵢ²).
- Template Parameters
-
T Scalar type (deduced). N Vector dimension (deduced).
- Parameters
-
v Input vector (N).
- Returns
- ‖v‖₂ = √(v(0)² + v(1)² + … + v(N−1)²).
- Note
- Future optimization: with a strided diagonal view, this could use a SIMD dot product kernel (dot(v, v) then sqrt).

◆ qr_givens()
| GivensQRResult< T, M, N > matrix_algorithms::qr_givens | ( | const FusedMatrix< T, M, N > & | A | ) |
Compute the QR decomposition using Givens rotations.
- Template Parameters
-
T Scalar type (deduced). M Number of rows (deduced, M ≥ N). N Number of columns (deduced).
- Parameters
-
A Input matrix (M×N).
- Returns
- GivensQRResult containing Q (M×M) and R (M×N).
- Example:
- // ... fill A ...auto qr = matrix_algorithms::qr_givens(A);// qr.Q * qr.R ≈ A// qr.Q is orthogonal: Qᵀ·Q = IGivensQRResult< T, M, N > qr_givens(const FusedMatrix< T, M, N > &A)Compute the QR decomposition using Givens rotations.Definition qr_givens.h:89

◆ qr_householder()
| QRResult< T, M, N > matrix_algorithms::qr_householder | ( | const FusedMatrix< T, M, N > & | A | ) |
Compute the Householder QR decomposition of a rectangular matrix.
- Template Parameters
-
T Scalar type (deduced). M Number of rows (deduced, M ≥ N). N Number of columns (deduced).
- Parameters
-
A Input matrix (M×N).
- Returns
- QRResult containing compact factorization with Q(), R(), and apply_Qt().
- Example:
- // ... fill A ...auto qr = matrix_algorithms::qr_householder(A);auto Q = qr.Q(); // 4×4 orthogonalauto R = qr.R(); // 4×3 upper triangular// Q * R ≈ A// For least squares (without forming Q):auto Qtb = qr.apply_Qt(b); // apply Qᵀ to b// then back-substitute top N rows of Qtb with R(0:N-1, 0:N-1)QRResult< T, M, N > qr_householder(const FusedMatrix< T, M, N > &A)Compute the Householder QR decomposition of a rectangular matrix.Definition qr.h:207

◆ rodrigues()
| FusedMatrix< T, 3, 3 > matrix_algorithms::rodrigues | ( | const FusedVector< T, 3 > & | omega, |
| T | t = T(1) |
||
| ) |
Compute the rotation matrix R = exp(t · [ω]×) via Rodrigues formula.
Computes the SO(3) rotation matrix for angular velocity ω over time step t.
- Template Parameters
-
T Scalar type (deduced).
- Parameters
-
omega Angular velocity 3-vector (rad/s). t Time step (seconds). Default 1.0 (omega is then the rotation vector).
- Returns
- 3×3 rotation matrix R ∈ SO(3).
◆ skew_symmetric()
| FusedMatrix< T, 3, 3 > matrix_algorithms::skew_symmetric | ( | const FusedVector< T, 3 > & | v | ) |
Construct the 3×3 skew-symmetric matrix [v]× from a 3-vector.
- Template Parameters
-
T Scalar type (deduced).
- Parameters
-
v 3-vector [v₁, v₂, v₃].
- Returns
- 3×3 skew-symmetric matrix such that [v]× · u = v × u.
◆ solve()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::solve | ( | const FusedMatrix< T, N, N > & | A, |
| const FusedVector< T, N > & | b | ||
| ) |
Solve Ax = b with automatic algorithm selection.
Attempts Cholesky path first (cheaper for SPD matrices), falls back to LU path for general non-singular matrices.
- Template Parameters
-
T Scalar type (deduced). N Matrix/vector dimension (deduced).
- Parameters
-
A Square input matrix (N×N). b Right-hand side vector (N).
- Returns
- Expected containing solution x on success, or MatrixStatus error on failure.
- Example:
- // ... fill A and b ...auto result = matrix_algorithms::solve(A, b);if (!result.has_value()) {// handle result.error()return;}auto& x = result.value();// A * x ≈ bExpected< FusedVector< T, N >, MatrixStatus > solve(const FusedMatrix< T, N, N > &A, const FusedVector< T, N > &b)Solve Ax = b with automatic algorithm selection.Definition linear_solve.h:142
◆ symmetric_rank_k_update() [1/2]
| FusedMatrix< T, N, N > matrix_algorithms::symmetric_rank_k_update | ( | const FusedMatrix< T, N, N > & | F, |
| const FusedMatrix< T, N, N > & | P | ||
| ) |
Compute the symmetric rank-k update P' = F·P·Fᵀ (no noise term).
Useful when process noise is added separately or is zero.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
F State transition matrix (N×N). P Covariance matrix (N×N), symmetric.
- Returns
- P' = F·P·Fᵀ.

◆ symmetric_rank_k_update() [2/2]
| FusedMatrix< T, N, N > matrix_algorithms::symmetric_rank_k_update | ( | const FusedMatrix< T, N, N > & | F, |
| const FusedMatrix< T, N, N > & | P, | ||
| const FusedMatrix< T, N, N > & | Q | ||
| ) |
Compute the symmetric rank-k update P' = F·P·Fᵀ + Q.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
F State transition matrix (N×N). P Covariance matrix (N×N), symmetric positive (semi-)definite. Q Process noise matrix (N×N), symmetric positive (semi-)definite.
- Returns
- P' = F·P·Fᵀ + Q.

◆ thomas_solve()
| Expected< FusedVector< T, N >, MatrixStatus > matrix_algorithms::thomas_solve | ( | const FusedVector< T, N > & | a, |
| const FusedVector< T, N > & | d, | ||
| const FusedVector< T, N > & | c, | ||
| const FusedVector< T, N > & | b | ||
| ) |
Solve a tridiagonal system Ax = b using the Thomas algorithm.
- Template Parameters
-
T Scalar type (deduced). N System size (deduced).
- Parameters
-
a Sub-diagonal vector (N). a(0) is unused. d Main diagonal vector (N). c Super-diagonal vector (N). c(N−1) is unused. b Right-hand side vector (N).
- Returns
- Expected containing solution x on success, or MatrixStatus::Singular on zero pivot.
- Example:
- // Solve [-2 1 0; 1 -2 1; 0 1 -2] x = bFusedVector<double, 3> a, d, c, b;a(0) = 0; a(1) = 1; a(2) = 1; // sub-diagonald(0) = -2; d(1) = -2; d(2) = -2; // main diagonalc(0) = 1; c(1) = 1; c(2) = 0; // super-diagonal// ... fill b ...auto result = matrix_algorithms::thomas_solve(a, d, c, b);Expected< FusedVector< T, N >, MatrixStatus > thomas_solve(const FusedVector< T, N > &a, const FusedVector< T, N > &d, const FusedVector< T, N > &c, const FusedVector< T, N > &b)Solve a tridiagonal system Ax = b using the Thomas algorithm.Definition tridiagonal.h:89
◆ trace()
| T matrix_algorithms::trace | ( | const FusedMatrix< T, N, N > & | A | ) |
Compute the trace of a square matrix.
- Template Parameters
-
T Scalar type (deduced). N Matrix dimension (deduced).
- Parameters
-
A Square input matrix (N×N).
- Returns
- Sum of diagonal elements: Σ A(i,i) for i = 0 … N−1.
